
(Recomiendo conocer primero el funcionamiento de los encoders, pueden ver este link y/o buscar por otras fuentes)
Los encoders tienen como principio generan señales digitales en respuesta al movimiento, sea de un disco o cinta perforada.
Éstos se utilizan, en su mayoría de las aplicaciones, para el control de posición y/o velocidad de un motor. Considerando básicamente el número de pulsos leído y la cantidad de ranuras que existen en un disco o cinta para controlar una posición específica o una velocidad.
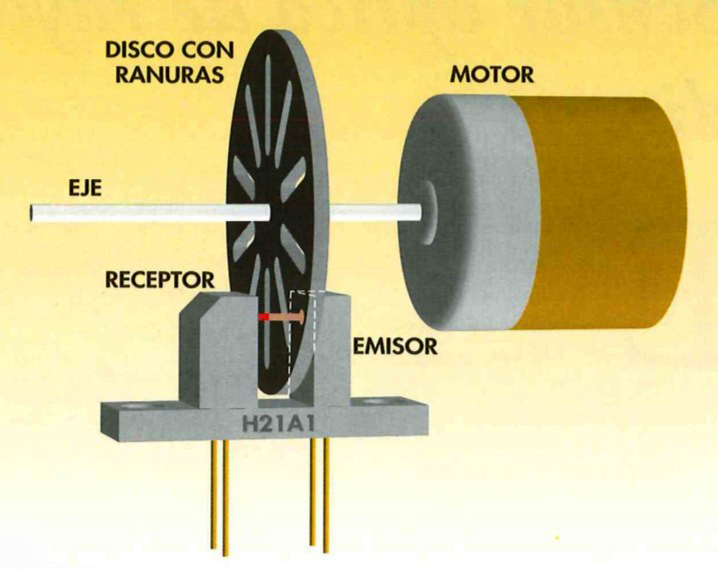
Sin embargo, este post se centrará en realizar el conteo de pulsos que genera un encoder. Para ello se necesitará el sensor optoacoplador y el disco o cinta ranurada, resistencias que se especifican en el circuito más adelante y la placa Arduino.